




[0001]本發明屬于軌道交通技術領域,具體是一種軌道機車用電動升降腳踏。
包括腳踏骨架,其包括兩相對且豎直設置的L型支撐板、用于連接兩L型支撐板的撐梁組件以及導桿;升降機構,其包括電動推桿和升降運動組件,所述電動推桿的一端與撐梁組件連接,另一端與升降運動組件連接;踏板組件,安裝于升降機構上方;以及電氣部件,用于控制升降機構的上升和下降運動。本發明所述的升降腳踏,當司乘人員按下控制開關后,電動推桿向前伸出或者回縮,提供推力實現升降運動組件沿導桿向上或向下運動,從而帶動踏板組件上升或下降。司乘人員根據實際需求調節好踏板組件位置后,便可松開控制開關,實現踏板組件位置鎖定。
[0002]現有軌道機車升降腳踏,大多采用可鎖氣彈簧的方案,如將腳踏踏板向上調節,先將可鎖氣彈簧解鎖,氣彈簧提供彈力驅使腳踏踏板上升;如將腳踏踏板向下調節,先將可鎖氣彈簧解鎖,司乘人員通過腿部持續對腳踏踏板施加向下的踩踏力,足以克服氣彈簧彈力后,可驅使腳踏踏板下降。
[0003]但是可鎖氣彈簧的方案存在氣彈簧伸出速度不易控制,腳踏板向下調節時司乘人員需提供較大的踩踏力等問題。
[0004]因此,本發明提供了一種軌道機車用電動升降腳踏,以解決上述背景技術中提出的問題。
[0005]本發明的目的在于提供一種軌道機車用電動升降腳踏,以解決上述背景技術中提出的問題和缺陷的至少一個方面。
[0006]根據本發明的一個方面,提供一種軌道機車用電動升降腳踏,包括:
[0007]腳踏骨架,其包括兩相對且豎直設置的L型支撐板、用于連接兩L型支撐板的撐梁組件以及導桿;
[0008]升降機構,其包括電動推桿和升降運動組件,所述電動推桿傾斜設置且電動推桿的一端與撐梁組件連接,電動推桿的另一端與升降運動組件連接;
[0009]踏板組件,安裝于升降機構上方,用于供司乘人員踩踏;以及
[0010]電氣部件,用于控制升降機構的上升和下降運動。
[0011]根據本發明的另一個實例性的實施例,所述撐梁組件包括第一撐梁、第二撐梁、第三撐梁和第四撐梁,所述第一撐梁和第四撐梁分別設置在兩個L型支撐板的頂端和末端上,所述第二撐梁設置在兩個L型支撐板的拐點處,所述第三撐梁設置在第二撐梁和第四撐梁之間,所述電動推桿的一端設置于第四撐梁上。
[0012]根據本發明的另一個實例性的實施例,所述導桿設置有兩個,兩個所述導桿對稱豎直設置在第二撐梁上且導桿頂部貫穿第二撐梁,所述第二撐梁對稱設有兩個下擺臂安裝座,所述第二撐梁通過下擺臂安裝座與升降運動組件鉸接。
[0013]根據本發明的另一個實例性的實施例,所述第四撐梁上設有推桿安裝座,所述第四撐梁通過推桿安裝座與電動推桿的一端鉸接。
[0014]根據本發明的另一個實例性的實施例,所述升降運動組件包括軸承組件、連接梁、轉軸以及擺臂組件,所述軸承組件設有兩組且分別套設在兩個導桿上,所述連接梁水平設置且兩端分別與兩組軸承組件連接,所述轉軸水平設置且轉軸的中部與電動推桿的伸出端轉動連接,所述擺臂組件設置有兩組,兩組擺臂組件對稱豎直設置在轉軸的兩端,每組擺臂組件的底部與第二撐梁連接,每組擺臂組件頂部與連接梁連接。
[0015]根據本發明的另一個實例性的實施例,所述軸承組件包括軸承單件和軸承支座,所述軸承支座設置在軸承單件的外部,所述軸承支座通過螺栓與連接梁連接。
[0016]根據本發明的另一個實例性的實施例,所述擺臂組件包括可轉動連接的上擺臂和下擺臂,所述下擺臂為倒置的三角形結構,所述下擺臂的底角與第二撐梁連接,所述下擺臂靠近升降運動組件的頂角與轉軸連接,所述下擺臂遠離升降運動組件的頂角與上擺臂連接,所述上擺臂的頂部與連接梁連接。
[0017]根據本發明的另一個實例性的實施例,所述踏板組件包括腳踏踏板和對稱布置在腳踏踏板兩端的兩個連接板,所述連接板與升降運動組件連接。
[0018]根據本發明的另一個實例性的實施例,所述電氣部件包括控制開關、指示燈、繼電器、接線端子、限位開關以及電連接器,所述控制開關包括上升控制開關和下降控制開關,上升控制開關和下降控制開關分別控制踏板組件的上升運動和下降運動,所述限位開關包括上止點限位開關和下止點限位開關,上止點限位開關和下止點限位開關分別為升降機構的上止點和下止點提供到位信號。
[0019]根據本發明的另一個實例性的實施例,所述電氣部件還包括電源轉換器。
[0020]與現有技術相比,本發明的有益效果是:
[0021]1、本發明所述的升降腳踏,當司乘人員按下控制開關后,電動推桿向前伸出或者回縮,提供推力實現升降運動組件沿導桿向上或向下運動,從而帶動踏板組件上升或下降。司乘人員根據實際需求調節好踏板組件位置后,便可松開控制開關,實現踏板組件位置鎖定。
[0022]2、本發明所述的電動升降腳踏能夠實現不同高度自由調整,滿足司乘人員不同的擱腳高度需求,提高司乘人員舒適感。
[0023]3、本發明所述的電動推桿內置的蝸輪蝸桿自鎖功能,電動推桿失電后可自動將升降機構鎖定,防止腳踏踏板踏板在外力作用下異常動作。
[0024]為了便于本領域技術人員理解,下面結合附圖對本發明作進一步的說明。
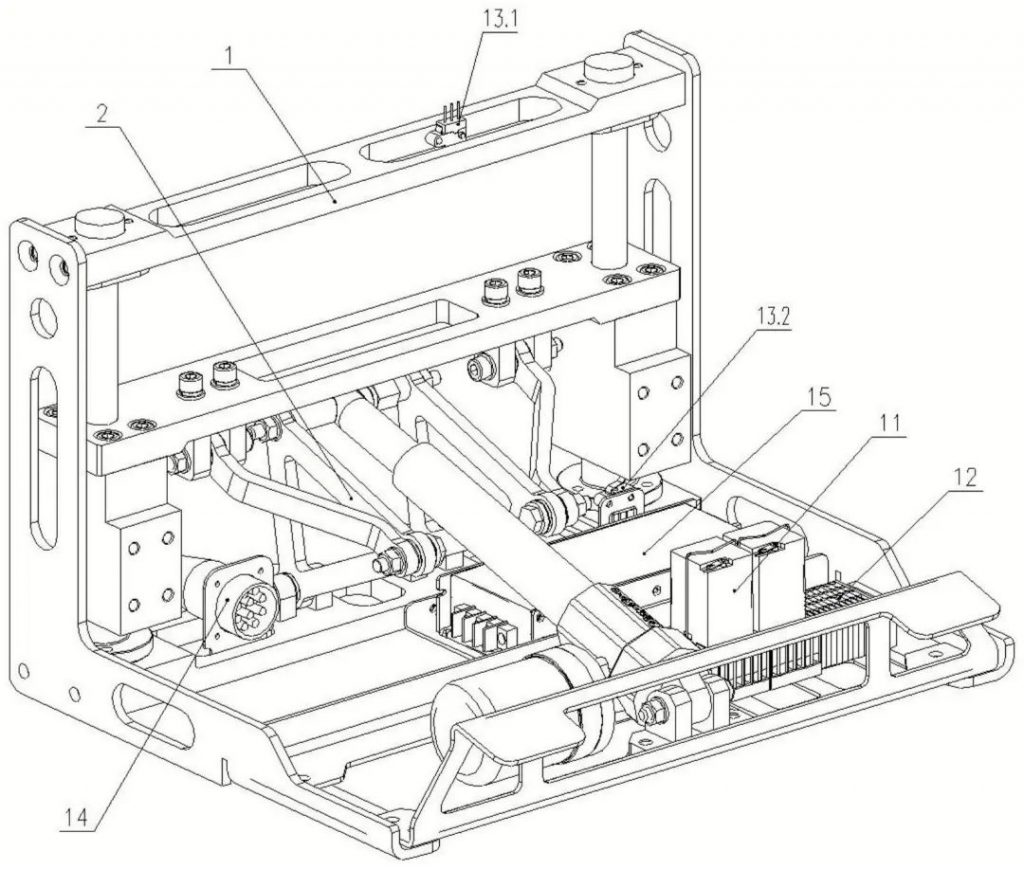
[0025]圖1是本發明實施例中升降腳踏內部形態的結構示意圖(圖中未示出踏板組件);
[0026]圖2是本發明實施例中升降腳踏外部形態的結構示意圖;
[0027]圖3是本發明實施例中腳踏骨架的結構示意圖;
[0028]圖4是本發明實施例中升降機構的結構示意圖;
[0029]圖5是本發明實施例中軸承組件以及連接梁的結構示意圖;
[0030]圖6是本發明實施例中電動推桿、轉軸以及擺臂組件的結構示意圖;
[0031]圖7是本發明實施例中踏板組件的結構示意圖;
[0032]圖8是本發明實施例中升降腳踏運動至上止點的結構示意圖(圖中未示出踏板組件);。
[0033]圖中:1、腳踏骨架;2、升降機構;3、踏板組件;4、電動推桿;5、軸承組件;6、連接梁;7、轉軸;8、擺臂組件;9.1、上升控制開關;9.2、下降控制開關;10、指示燈;11、繼電器;12、接線端子;13.1、上止點限位開關;13.2、下止點限位開關;14、電連接器;15、電源轉換器;1.1、L型支撐板;1.2、第一撐梁;1.3、第二撐梁;1.4、第三撐梁;1.5、第四撐梁;1.6、導桿;1.7、電動推桿安裝座;1.8、下擺臂安裝座;
[0034]3.1、腳踏踏板;3.2、連接板;
[0035]5.1、軸承單件;5.2、軸承支座;5.3、上擺臂安裝座;
[0036]8.1、下擺臂;8.2、上擺臂。
[0037]為使本發明的目的、技術方案和優點更加清楚明白,下面通過實施例,并結合附圖,對本發明的技術方案作進一步具體的說明。在說明書中,相同或相似的附圖標號指示相同或相似的部件。下述參照附圖對本發明實施方式的說明旨在對本發明的總體發明構思進行解釋,而不應當理解為對本發明的一種軌道機車用電動升降腳踏限制。
[0038]另外,在下面的詳細描述中,為便于解釋,闡述了許多具體的細節以提供對本披露實施例的全面理解。然而明顯地,一個或多個實施例在沒有這些具體細節的情況下也可以被實施。在其他情況下,公知的結構和裝置以圖示的方式體現以簡化附圖。
[0039]根據本發明的一個總體技術構思,參見圖1、圖2和圖3,一種電動升降腳踏,包括腳踏骨架1、升降機構2、踏板組件3、電氣部件,腳踏骨架1包括兩相對且豎直設置的L型支撐板
1.1、用于連接兩L型支撐板1.1的撐梁組件以及導桿1.6,升降機構2包括電動推桿4和升降運動組件,電動推桿4傾斜設置,且一端與撐梁組件連接,而另一端與升降運動組件連接,踏板組件3安裝在升降機構2上方。
[0040]本實施例采用電動推桿4作為動力源,通過上升控制開關9.1和下降控制開關9.2可一鍵啟動,操作簡單,實現控制踏板組件3的上升或下降,司乘人員將踏板組件3調節到位后,通過電動推桿4內置的蝸輪蝸桿自鎖功能將升降機構2鎖定。
[0041]參見圖3,撐梁組件包括第一撐梁1.2、第二撐梁1.3、第三撐梁1.4和第四撐梁1.5,第一撐梁1.2和第四撐梁1.5分別設置在兩個L型支撐板1.1的頂端和末端上,第二撐梁1.3設置在兩個L型支撐板1.1的拐點處,第三撐梁1.4設置在第二撐梁1.3和第四撐梁1.5之間,電動推桿4的一端通過設置于第四撐梁1.5上的電動推桿安裝座1.7與腳踏骨架1連接。
[0042]導桿1.6的數量為兩個且對稱豎直設置在第二撐梁1.3上,導桿1.6頂部穿過第一撐梁1.2。第二撐梁1.3還設置有用于連接擺臂組件8的下擺臂安裝座1.8。撐梁組件與兩L型支撐板1.1通過螺紋連接形成的腳踏骨架1,有效避免了升降腳踏整體傾斜或變形。
[0043]參見圖4,升降運動組件包括軸承組件5、連接梁6、轉軸7、擺臂組件8,軸承組件5為兩組且分別套設在兩個導桿1.6上,連接梁6水平設置且兩端分別與兩組軸承組件5連接,轉軸7水平設置且轉軸7的中部與電動推桿4伸出端轉動連接,擺臂組件8包括兩組且對稱豎直設置在轉軸7的兩端,每組擺臂組件8的底部與第二撐梁1.3連接,而頂部與連接梁6連接。
[0044]進一步地,電動推桿4傾斜設置時與水平方向間的夾角約為15°,可有效規避因垂直安裝時電動推桿4尺寸過大,導致司機室操作臺上下安裝空間過小而無法安裝問題。
[0045]參見圖5,軸承組件5包括軸承單件5.1和軸承支座5.2,軸承支座5.2設置在軸承單件5.1的外部,連接梁6設置有用于連接擺臂組件8的上擺臂安裝座5.3。連接梁6通過螺栓與軸承組件5連接,可有效保障兩導桿1.6安裝后的平行度及垂直度,確保升降運動組件順利升降。
[0046]參見圖6,擺臂組件8包括上下可轉動連接的上擺臂8.2和下擺臂8.1,下擺臂8.1為倒置的三角形結構,下擺臂8.1的底角與第二撐梁1.3連接,而靠近軸承組件5的頂角與轉軸7連接,遠離軸承組件5的頂角與上擺臂8.2連接,上擺臂8.2的頂部與連接梁6連接。
[0047]參見圖7,踏板組件3包括腳踏踏板3.1和對稱布置在腳踏踏板3.1兩端的兩個連接板3.2,連接板3.2與軸承組件5連接。
[0048]參見圖1和圖2,電氣部件包括控制開關、指示燈10、繼電器11、接線端子12、限位開關、電連接器14等,如有需要,還包括電源轉換器15等。控制開關為上升控制開關9.1、下降控制開關9.2兩件,分別控制踏板組件3的上升運動和下降運動,限位開關為上止點限位開關13.1、下止點限位開關13.2兩件,分別為升降機構2的上止點和下止點提供到位信號。
[0049]本實施例升降腳踏的工作原理如下:
[0050]當司乘人員按下上升控制開關9.1后,電動推桿4得電,伸出端向前推出,提供推力讓轉軸7及下擺臂8.1繞下擺臂安裝座1.8的軸線作旋轉運動,上擺臂8.2隨之轉動,并帶動連接梁6、軸承組件5沿導桿1.6向上運動,從而帶動踏板組件3上升。司乘人員在任意位置松開上升控制開關9.1后,電動推桿4失電,電動推桿4內置的蝸輪蝸桿自鎖功能將升降機構2鎖定;或者當踏板組件3上升至上止點后,上止點限位開關13.1動作,使電動推桿4失電并將升降機構2鎖定。升降腳踏運行至上止點的位置狀態示意可參見圖8(圖中未示出踏板組件)。
[0051]當司乘人員按下下降控制開關9.2后,電動推桿4得電,伸出端向后回縮,提供拉力讓轉軸7及下擺臂8.1繞下擺臂安裝座1.8的軸線作旋轉運動,上擺臂8.2隨之轉動,并帶動連接梁6、軸承組件5沿導桿1.6向下運動,從而帶動踏板組件3下降。司乘人員在任意位置松開下降控制開關9.2后,電動推桿4失電,電動推桿4內置的蝸輪蝸桿自鎖功能將升降機構2鎖定;或者當踏板組件3下降至下止點后,下止點限位開關13.2動作,使電動推桿4失電并將升降機構2鎖定。
[0052]以上所述的具體實施例,對本發明的目的、技術方案和有益效果進行了進一步詳細說明,所應理解的是,以上所述僅為本發明的具體實施例而已,并不用于限制本發明,凡在本發明的精神和原則之內,所做的任何修改、等同替換、改進等,均應包含在本發明的保護范圍之內。

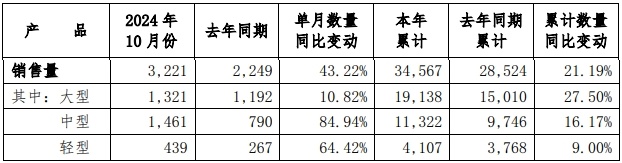
國際客車展獲悉,11月5日,宇通客車股份有限公司發布2024年10月份產銷數據快報。快報顯示,2024年10月,宇通客車實現銷售3221輛,同比增長43.22%。其中,大型車1321輛,同比增長10.82%;中型車1461輛,同比增長 84.94%;輕型車439輛,同比增長64.42%。 宇通客車作為國內客車行業的領軍企業,一直以來以其卓越的產品質量、先進的技術和完善的售后服務在市場中占據重要地位。隨著國家對新能源汽車的大力支持和推廣,宇通客車積極響應政策號召,加大新能源客車的研發和生產力度,為宇通客車的銷售增長提供了新的動力。同時,國家對公共交通的投入不斷增加,城市公交、旅游客運等領域的需求持續增長,也為宇通客車的發展提供了廣闊的市場空間。 特別推薦:上海國際客車展參觀報名? ? ??上海國際客車展展位預定
合作郵箱:chinaiut@sgexpo.cn
新聞熱線:021-3114 8748
廣告/媒體合作:13916277698
轉載內容版權歸作者及來源網站所有,本站原創內容轉載請注明來源
Copyright ? 晟格會展(上海)有限公司 版權所有 Powered by Tp滬ICP備18026942號-6 ![]() 滬公網安備 31011302006543號
滬公網安備 31011302006543號




